安裝")
1分鐘,學會全彩智能警戒球機巡航警戒功能
作 者:重慶監(jiān)控安裝 ??瀏覽: ??發(fā)布日期:2018-10-29
??低?/u>全彩智能警戒球機自今年7月發(fā)布以來
作為??低旳I Cloud邊緣智能的一員
采用適合視頻監(jiān)控場景的深度學習硬件及算法
有效去除樹葉、小動物等干擾
提供準確的人車分類偵測
并且支持聯(lián)動跟蹤,變倍看清目標細節(jié)
這是近期收到的一些實際場景的應用視頻,先來回顧一下產(chǎn)品亮點,請看好啦。
01
準確識別人體,聯(lián)動跟蹤細節(jié)
02
準確識別車輛,排除其他干擾
那么全彩智能警戒球機除了在區(qū)域入侵和越界偵測等Smart事件偵測中準確識別人車、聯(lián)動變倍跟蹤發(fā)揮了出色表現(xiàn)之外,其實還有一個強大的功能,也是今天文章的重點。
設置多個預置點,設置巡航路徑,可實現(xiàn)大范圍多點智能巡航警戒覆蓋。
如此實用的功能,我們以區(qū)域入侵偵測為例,花1分鐘來學習一下。
① 根據(jù)需求劃好規(guī)則框,配置預置點1
打開球機WEB界面,選擇配置-事件-smart事件-區(qū)域入侵偵測。
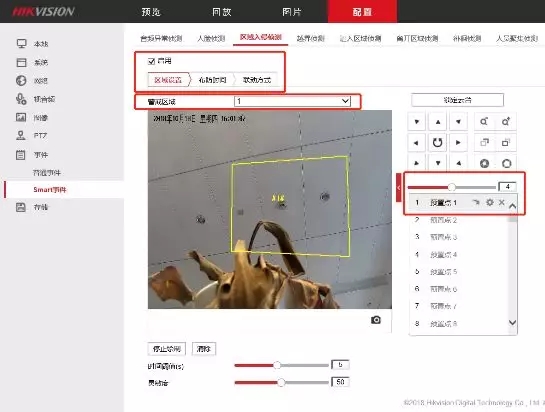
勾選啟動,選擇警戒區(qū)域1,調(diào)整云臺和變倍至合適區(qū)域,劃定區(qū)域框,調(diào)整時間閥值和靈敏度。點擊界面右側(cè)預置點1的齒輪形設置點即設置了預置點1為該畫面,也確認了該畫面下的警戒區(qū)域1與預置點1進行了關聯(lián),注意記得保存。
② 根據(jù)需求劃好規(guī)則框,配置預置點2
同樣在該界面,選擇警戒區(qū)域2,調(diào)整云臺和變倍至合適區(qū)域,劃定區(qū)域框,調(diào)整時間閥值和靈敏度。點擊右側(cè)預置點2的齒輪形設置點,即設置了預置點2為該畫面,也確認了該畫面下的警戒區(qū)域2與預置點2進行了關聯(lián),,注意記得保存。
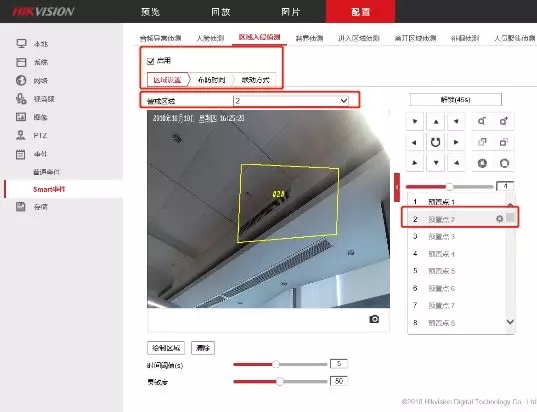
以此類推,可最多設置4個警戒區(qū)域,每個區(qū)域可以關聯(lián)預置點。
③ 根據(jù)設置的預置點,設定巡航路線

在預覽界面的右側(cè)選項中,小紅旗代表預置點,中間的即為巡航設置,右側(cè)的為記錄花樣掃描,我們選擇中間的巡航,也就是把預置點串聯(lián)起來行程軌跡。
該款球機最多可以設置8條巡航路徑,選擇巡航路徑1,按綠色加號,增加到2個我們需要設置的預置點,選擇速度和時間即可。點擊保存,即完成了巡航路徑的設置。
速度:1-40可選,每級的速度不同,值越大速度越快。
時間:15-3600可選,即最短停留15秒,最多停留1個小時。
④ 設定巡航路線后的實際智能效果
⑤ 功能應用價值
全彩智能警戒球機的該功能可以適用于大范圍場景中不便于在近處架設立桿,并且可以滿足大范圍多點進行智能警戒的需求,實現(xiàn)智能跟蹤變倍更能看清人車細節(jié)。
??低暼手悄芫淝驒C(iDS-2DC7223MX-A),歡迎聯(lián)系??低暜?shù)亟?jīng)銷商咨詢選購。